

ハイコストパフォーマンスモデル YK-XE
人手不足の悩みを自動化で解決!
お求めやすい価格で、生産現場の高効率化、省人化、品質安定をかなえます。
- アーム長:400mm~710mm
- 最大可搬質量:4kg~10kg
特長
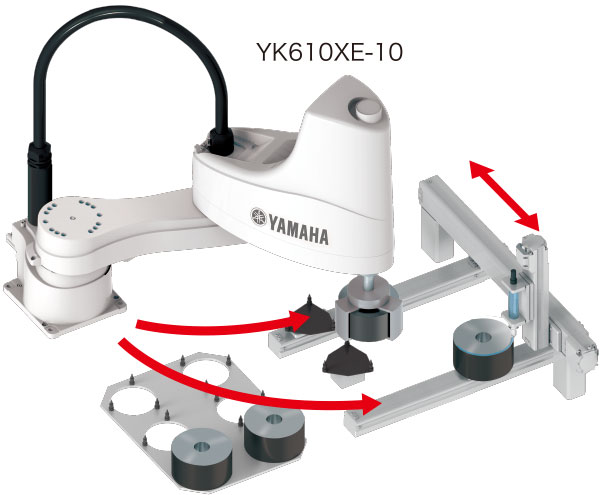
01 自動車部品などの搬送、組み立てに最適
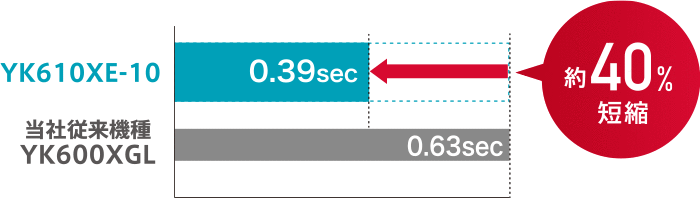
02 ハイスピード動作で生産性向上
アーム構造の見直しによる振動低減の実現やモーションの最適化により、標準サイクルタイムを短縮しました。
高速かつ振動の少ない俊敏な動作で生産性向上に寄与します

03 幅広い用途に 最大可搬質量 4kg~10kg
高精度が要求される組立作業、高速動作が要求される食品などの仕分け作業など、幅広い分野に対応します。
最大可搬質量は10kgのため、自動車部品などの重量のあるワークにも対応可能です。

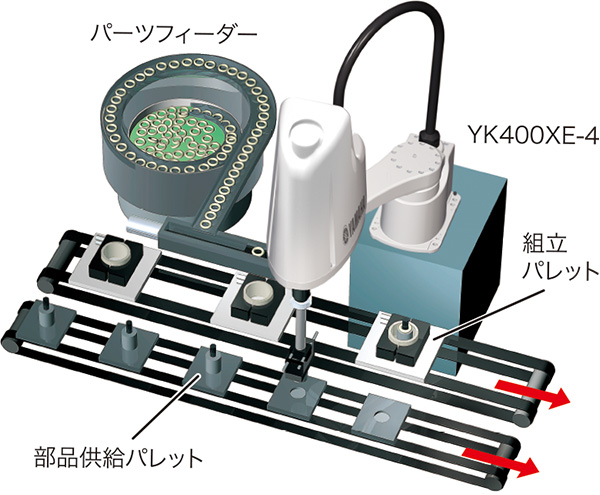
04 使用例


05 低価格
高い動作性能と低価格を両立しています。
コストパフォーマンスの高い生産設備の構築を可能とします。
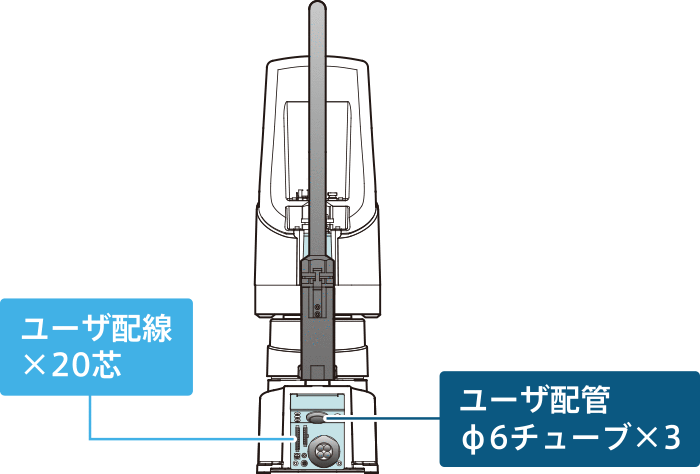
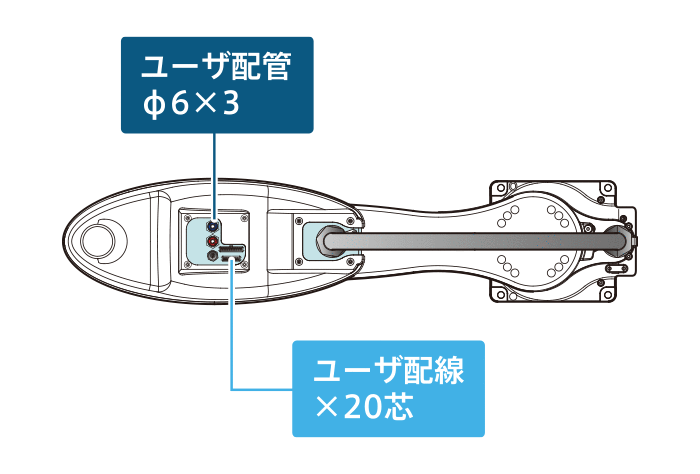
06 ユーザビリティ向上
ツール用に使用できる配線や配管の本数、太さはクラストップレベルです。
配線・配管の取り回しを容易にし、断線のリスクを低減します。(YK510XE-10、YK610XE-10、YK710XE-10)
ユーザ配管Φ4×3本です。
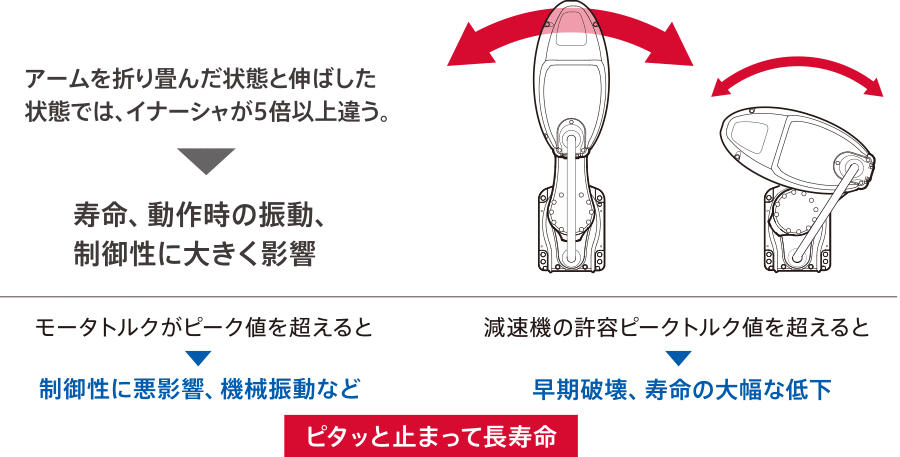
07 最適な加減速を自動的に設定
動作開始時のアーム姿勢と動作終了時のアーム姿勢から、最適な加速度、減速度を自動で選択します。
3つのパラメータ※を入力するだけで、モータピークトルクや減速機許容ピークトルクの許容値を超えることはありません。
どんなときもモータのパワーをフルに引き出し、高い加減速度を維持します。
※搬送質量、R軸慣性モーメント、R軸慣性モーメントオフセット量
08 中通しシャフト、中通しキャップ選択可能
(オプション仕様) NEWYK400XE-4も対応
エアや配線の取り回しに便利な、配線・配管用の「中通しシャフト」「中通しキャップ」をお選びいただけます。 配線・配管を取り付けるステーなどを設計、製作する必要がなく、配線・配管のルート検討もラクに行えます。
また、本体内部を通すことで動作時の断線の心配を軽減します。

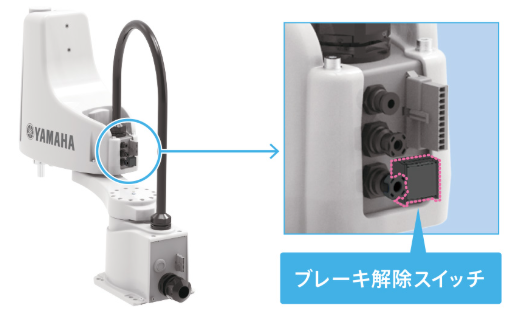
09 ブレーキ解除スイッチ選択可能 (オプション仕様)
非常停止状態で「ブレーキ解除スイッチ」を押している間、Z軸ブレーキが解除され、Z軸を上下に動かすことができます(スイッチを離すとZ軸にブレーキがかかります)。 設置調整時の利便性が向上します。
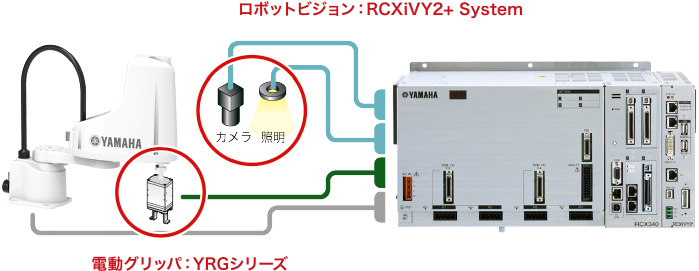
10 RCX340コントローラとの組み合わせにより使いやすく
多機能コントローラRCX340との組み合わせにより、多種多様なアプリケーションに対応可能です。
ロボット一体型ビジョンシステム「RCXiVY2+」を使うことで、簡単に画像処理機能を追加でき、高度な生産設備の構築ができます。
サポートソフトやプログラミングボックスなど制御支援ツールも充実しています。

11 ビジョンシステムも簡単追加
ロボットもグリッパも照明もひとつのコントローラで一括制御できます。
12 多彩なフィールドネットワークに対応
CC-Link、EtherNet/IP、DeviceNet、PROFIBUS、PROFINET、EtherCATなど充実したフィールドネットワークに対応しています。

13 スカラロボット 1976年から積み重ねた実績
ヤマハ発動機のスカラロボットは、自社の二輪車製造ラインでの使用を目的として研究開発をスタート。 1976年に自社工場に導入して以来、長い歴史があります※。 市場で鍛えられ、改良に改良を重ねた長い実績が高い信頼の証です。
※販売開始は1984年
基本仕様
| YK400-XE4 | X軸 | Y軸 | Z軸 | R軸 | ||
|---|---|---|---|---|---|---|
| 軸仕様 | アーム長(mm) | 225 | 175 | 150 | – | |
| 回転範囲(°) | ±132 | ±150 | – | ±360 | ||
| モータ出力 AC(W) | 200 | 100 | 100 | 100 | ||
| 減速機構 | 伝達方式 | モータ ~ 減速機 | 直結 | タイミングベルト | ||
| 減速機 ~ 出力 | 直結 | タイミングベルト | ||||
| 繰り返し位置決め精度※1(XYZ:mm)(R:°) | ±0.01 | ±0.01 | ±0.01 | |||
| 最高速度(XYZ:m/sec)(R:°/sec) | 6 | 1.1 | 2600 | |||
| 最大可搬質量(kg) | 4(標準仕様)、3(オプション仕様※4) | |||||
| 標準サイクルタイム:2kg 可搬時※2(sec) | 0.41 | |||||
| R軸許容慣性モーメント※3(kgm2) | 0.05 (0.5kgfcms2) | |||||
| ユーザ配線(sq×本) | 0.2 × 10 | |||||
| ユーザ配管(外径) | φ4×3本 | |||||
| 動作リミット設定 | 1.ソフトリミット 2.メカストッパ(X,Y,Z軸) | |||||
| ロボットケーブル長(m) | 標準:3.5 オプション:5, 10 | |||||
| 本体質量(kg) | 17 | |||||
※1周囲温度一定時の値です(X、Y軸)。
※2水平方向300mm、垂直方向25mm往復、粗位置決めアーチ動作時。
※3先端重量、R軸慣性モーメントオフセット量の設定により加速度係数が自動設定されます。
※4オプション仕様(ユーザ配線配管スプライン中通し仕様)の場合は最大可搬質量は3kgとなります。
| YK510XE-10 | X軸 | Y軸 | Z軸 | R軸 | ||
|---|---|---|---|---|---|---|
| 軸仕様 | アーム長(mm) | 235 | 275 | 200 | – | |
| 回転範囲(°) | ±134 | ±152 | – | ±360 | ||
| モータ出力 AC(W) | 400 | 200 | 200 | 200 | ||
| 減速機構 | 伝達方式 | モータ ~ 減速機 | 直結 | タイミングベルト | ||
| 減速機 ~ 出力 | 直結 | タイミングベルト | ||||
| 繰り返し位置決め精度※1(XYZ:mm)(R:°) | ±0.01 | ±0.01 | ±0.01 | |||
| 最高速度(XYZ:m/sec)(R:°/sec) | 7.8 | 2 | 2600 | |||
| 最大可搬質量(kg) | 10(標準仕様)、9(オプション仕様※4) | |||||
| 標準サイクルタイム:2kg 可搬時※2(sec) | 0.38 | |||||
| R軸許容慣性モーメント※3(kgm2) | 0.3 | |||||
| ユーザ配線(sq×本) | 0.2 × 20 | |||||
| ユーザ配管(外径) | φ6×3本 | |||||
| 動作リミット設定 | 1.ソフトリミット 2.メカストッパ(X,Y,Z軸) | |||||
| ロボットケーブル長(m) | 標準:3.5 オプション:5, 10 | |||||
| 本体質量(kg) | 25 | |||||
※1周囲温度一定時の値です(X、Y軸)。
※2水平方向300mm、垂直方向25mm往復、粗位置決めアーチ動作時。
※3先端重量、R軸慣性モーメントオフセット量の設定により加速度係数が自動設定されます。
※4オプション仕様(ツールフランジ取付仕様、ユーザ配線配管スプライン中通し仕様)の場合は最大可搬質量は9kgとなります。
| YK610XE-10 | X軸 | Y軸 | Z軸 | R軸 | ||
|---|---|---|---|---|---|---|
| 軸仕様 | アーム長(mm) | 335 | 275 | 200 | – | |
| 回転範囲(°) | ±134 | ±152 | – | ±360 | ||
| モータ出力 AC(W) | 400 | 200 | 200 | 200 | ||
| 減速機構 | 伝達方式 | モータ ~ 減速機 | 直結 | タイミングベルト | ||
| 減速機 ~ 出力 | 直結 | タイミングベルト | ||||
| 繰り返し位置決め精度※1(XYZ:mm)(R:°) | ±0.01 | ±0.01 | ±0.01 | |||
| 最高速度(XYZ:m/sec)(R:°/sec) | 8.6 | 2 | 2600 | |||
| 最大可搬質量(kg) | 10(標準仕様)、9(オプション仕様※4) | |||||
| 標準サイクルタイム:2kg 可搬時※2(sec) | 0.39 | |||||
| R軸許容慣性モーメント※3(kgm2) | 0.3 | |||||
| ユーザ配線(sq×本) | 0.2 × 20 | |||||
| ユーザ配管(外径) | φ6×3本 | |||||
| 動作リミット設定 | 1.ソフトリミット 2.メカストッパ(X,Y,Z軸) | |||||
| ロボットケーブル長(m) | 標準:3.5 オプション:5, 10 | |||||
| 本体質量(kg) | 25 | |||||
※1周囲温度一定時の値です(X、Y軸)。
※2水平方向300mm、垂直方向25mm往復、粗位置決めアーチ動作時。
※3先端重量、R軸慣性モーメントオフセット量の設定により加速度係数が自動設定されます。
※4オプション仕様(ツールフランジ取付仕様、ユーザ配線配管スプライン中通し仕様)の場合は最大可搬質量は9kgとなります。
| YK710XE-10 | X軸 | Y軸 | Z軸 | R軸 | ||
|---|---|---|---|---|---|---|
| 軸仕様 | アーム長(mm) | 435 | 275 | 200 | – | |
| 回転範囲(°) | ±134 | ±152 | – | ±360 | ||
| モータ出力 AC(W) | 400 | 200 | 200 | 200 | ||
| 減速機構 | 伝達方式 | モータ ~ 減速機 | 直結 | タイミングベルト | ||
| 減速機 ~ 出力 | 直結 | タイミングベルト | ||||
| 繰り返し位置決め精度※1(XYZ:mm)(R:°) | ±0.02 | ±0.01 | ±0.01 | |||
| 最高速度(XYZ:m/sec)(R:°/sec) | 9.5 | 2 | 2600 | |||
| 最大可搬質量(kg) | 10(標準仕様)、9(オプション仕様※4) | |||||
| 標準サイクルタイム:2kg 可搬時※2(sec) | 0.42 | |||||
| R軸許容慣性モーメント※3(kgm2) | 0.3 | |||||
| ユーザ配線(sq×本) | 0.2 × 20 | |||||
| ユーザ配管(外径) | φ6×3本 | |||||
| 動作リミット設定 | 1.ソフトリミット 2.メカストッパ(X,Y,Z軸) | |||||
| ロボットケーブル長(m) | 標準:3.5 オプション:5, 10 | |||||
| 本体質量(kg) | 26 | |||||
※1周囲温度一定時の値です(X、Y軸)。
※2水平方向300mm、垂直方向25mm往復、粗位置決めアーチ動作時。
※3先端重量、R軸慣性モーメントオフセット量の設定により加速度係数が自動設定されます。
※4オプション仕様(ツールフランジ取付仕様、ユーザ配線配管スプライン中通し仕様)の場合は最大可搬質量は9kgとなります。