【オムロン】モバイルロボット”LDシリーズ”

特長
- ナチュラルナビゲーション ぶつからない進路を自ら選んで走行
モバイルロボットは、内蔵しているレーザスキャナで人や障害物を検知し、どのように避けるかをリアルタイムに考えながら、ぶつかることなくゴールまで安全に運びます。
- 障害物を避けつつ、搬送時間を短く 独自アルゴリズムの自律走行
マップ上のゴールを設定・指示するだけで、独自のルート検索アルゴリズムによりもっとも効率的なルートを自動で選択して走行します。
ルート検索はリアルタイムに実行しているので、突然、障害物が出現しても自動で別ルート検索し、ゴールまで確実に走行します。
- 衝突防止機能で安全に走行 充実のセーフティ機能
グローバルの安全規格に準拠(EN1525/ANSI B56.5/JIS D 6802)した設計。高輝度のライトディスクやバンパー、障害物レーザスキャナなど充実の安全機能を搭載しています。
- ダイナミックな環境変動には位置認識オプション「Acuity Localization」 【特許取得済】
倉庫などの通路上の荷物が頻繁に変化するようなダイナミックな環境には、天井照明とモバイルロボットの位置を照合しながら走行できるオプション「Acuity Localization」をご使用いただくことで高精度な位置認識が可能となります。
- フリートマネージメント 最大100台を操り、ムダなく運行
最大100台のモバイルロボットの現在位置、空き状況を、専用コントローラ「Enterprise Manager 1100」が常に把握し、最適な配送を管理できます。セル生産でもコンベアラインでも無駄な搬送動作や搬送ミスを防ぎ工程間の停滞を削減します。

- 搬送要求を発生順にオーダーするだけ Jobベースフリート制御
モバイルロボットを増やすほど複雑になる設置やルート設定を、専用コントローラ「Enterprise Manager 1100」が一手に引き受けます。
生産実行システムからの「工程AからBへ搬送」といった指示をJobとして受けとり、最大100台のモバイルロボットを自動で配車します。
- 狭い通路でも、渋滞しないよう交通整理 トラフィックコントロール機能
同じゴールに向かう複数のモバイルロボットが狭いスペースに集中しても、渋滞、スタックすることはありません。スタンドバイゴールを設定するだけで渋滞やスタックを回避するように順番に運行指示を行います。また、Non-FIFO機能によるフリートの最適制御など、豊富なトラフィックコントロール機能でスループットの最大化を実現します。
- 全ロボットの搬送状況が一目でわかる リアルタイムモニタリング
すべてのモバイルロボットの位置、バッテリ状態、Jobのステータスなどをモバイルロボット統合ソフトウェア「MobilePlanner」でリアルタイムにモニタリングできます。
- イージーオペレーション 最短半日で、ライン変更に対応
モバイルロボットを走行させるだけで、周囲環境の情報を収集し、移動の手がかりとなるマップをモバイルロボット自らが作成します。
工場レイアウトのCAD図がなくても、頻繁なライン変更があっても、移動範囲のマップを短時間で簡単に制作できます。
- 現場環境に合わせた運行制御を簡単に設定 MobilePlanner
作成したマップをカスタマイズできる豊富な機能を、モバイルロボット統合ソフトウェア「MobilePlanner」に操作しやすいグラフィカルな画面でご用意しています。
たとえば下に示す図のような項目をマップ上で簡単に設定できます。
また、現場環境の一部にレイアウト変更があった場合は、そのエリアだけを再度走行して状況をスキャンし、既存のマップに取り込むことも可能です。
- ラインを止めずにロボットを増設 ロボット間マップ共有
マップ情報やJob内容はすべて専用コントローラ「Enterprise Manager 1100」が管理するので、ロボットにはIPアドレスを割り当てるだけで簡単に追加可能です。生産ラインの停止は不要です。
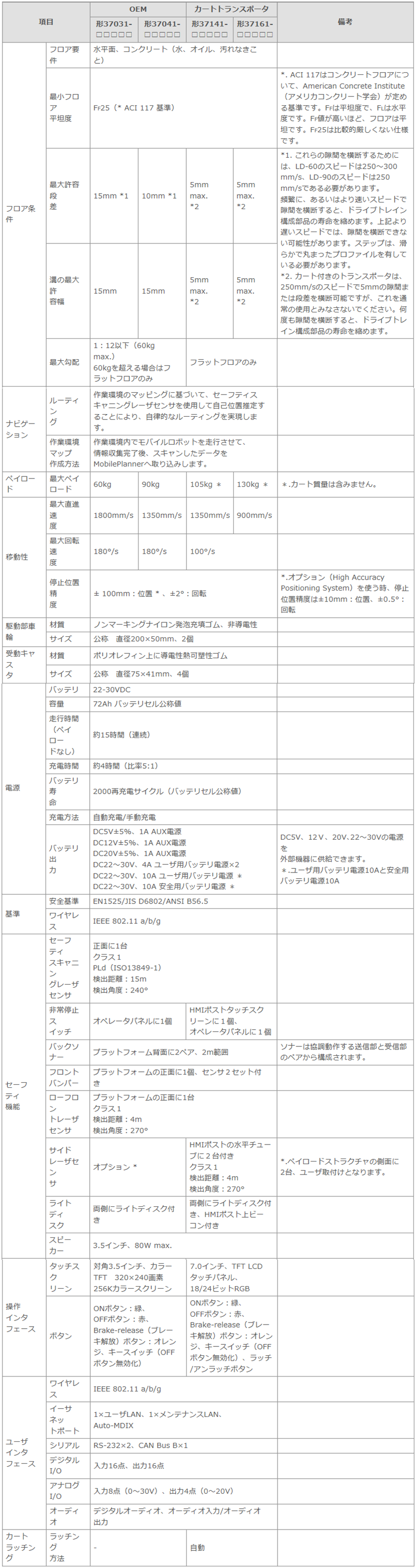
基本仕様
一般仕様
性能仕様:AIV(Autonomous Intelligent Vehicle)